
Page 231 - 《社会》2023年第3期
P. 231
社会·2023·3
特,2012)。 基准模型设定如式 1 所示:
(1)
ln(F ij) = Mean 0 + Row i + Column j + lnteraction ij
其中,F ij 是出身第 i 阶层并流动到第 j 阶层的期望频数,Mean 0 是总平
5
均效应参数,Row i 是行效应参数,Column j 是列效应参数, 而且撞i = 1 Row i
5 5
= 撞j = 1 Column j = 0, lnteraction ij 是行列交互效应参数, 且撞i = 1lnteraction ij
5
= 撞j = 1 lnteraction ij = 0。 效应参数作为指示变量的系数出现在拟合模型
中,表示效应特征是否存在(孙旭等,2019)。
测量流动距离的模型假定每一次流动实现的跨度都是由它所跨越
的两个阶层之间的距离决定的(豪特,2012),基于此,我们可以通过流
动表中可观测的不同跨度的频数, 来估计无法直接观测的代际流动距
离。在这一假设下,因为两个阶层之间的距离是固定的,所以,无论是向
上流动还是向下流动,阶层Ⅴ和阶层Ⅳ之间的流动跨度都是一个值,即
跨越参数 V 1。 与之类似,阶层Ⅳ与阶层Ⅲ、阶层Ⅲ与阶层Ⅱ、阶层Ⅱ与
阶层Ⅰ之间的跨越参数分别是 V 2、V 3 和 V 4。 根据这种算法,任意两个阶
11"
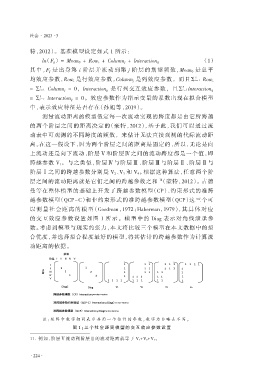
层之间的流动距离就是它们之间的跨越参数之和 (豪特,2012)。 古德
曼等在整体模型的基础上开发了跨越参数模型(CP)、约束形式的准跨
越参数模型(QCP-C)和非约束形式的准跨越参数模型(QCP)这三个可
以 测 量 社 会 距 离 的 模 型(Goodman,1972;Haberman,1979),其 具 体 对 应
的交互效应参数设置如图 1 所示。 模型中的 Diag 表示对角线继承参
数。 考虑到模型与现实的张力,本文将比较三个模型在本文数据中的拟
合优度,并选择拟合程度最好的模型,将其估计的跨越参数作为计算流
动距离的依据。
注 :矩 阵 中 数 字 相 同 表 示 共 用 一 个 估 计 的 参 数 ,数 字 为 0 略 去 不 写 。
图 1:三 个 社 会 距 离 模 型 的 交 互 效 应 参 数 设 置
11. 例如,阶层Ⅴ流动到阶层Ⅱ的流动距离就等于 V 1+V 2+V 3。
· 224·